This page was generated from
docs/source/notebooks/trafo_geom.ipynb.
Geometrical transformations#
PolyData instances with an attached point data support all kinds of linear transformations related to moving stuff around in 2d space.
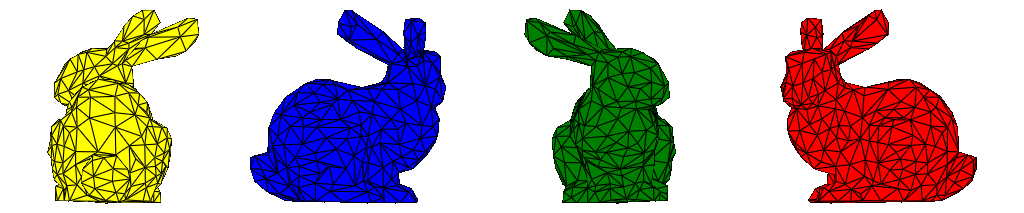
Transforming the points#
[1]:
from polymesh import PolyData
from polymesh.examples import download_bunny_coarse
import numpy as np
mesh = PolyData()
mesh["bunny_1"] = download_bunny_coarse(tetra=False, read=True).centralize()
# obtain the second mesh by rotating and moving the first one
mesh["bunny_2"] = (
mesh["bunny_1"]
.spin("Space", [0, 0, np.pi/2], "XYZ", inplace=False)
.move([0.2, 0, 0])
)
# obtain the third mesh by rotating and moving the second one
mesh["bunny_3"] = (
mesh["bunny_2"]
.spin("Space", [0, 0, np.pi/2], "XYZ", inplace=False)
.move([0.2, 0, 0])
)
# obtain the fourth mesh by absolute transformations
mesh["bunny_4"] = (
download_bunny_coarse(tetra=False, read=True).centralize()
.rotate("Space", [0, 0, 3*np.pi/2], "XYZ")
.move([0.6, 0, 0])
)
[2]:
mesh["bunny_1"].config["plot"] = dict(color="red")
mesh["bunny_2"].config["plot"] = dict(color="green")
mesh["bunny_3"].config["plot"] = dict(color="blue")
mesh["bunny_4"].config["plot"] = dict(color="yellow")
plotter = mesh.plot(
notebook=True,
config_key=["plot"],
return_plotter=True,
theme="document",
show_edges=True,
)
plotter.camera.tight(padding=0.1, view="xz", negative=True)
plotter.show(jupyter_backend="static")
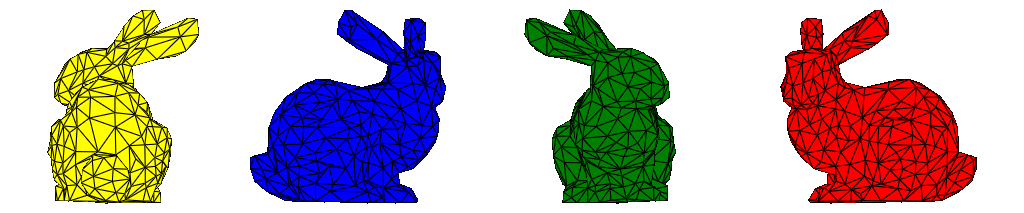
Transforming the references#
In the previous example we achieved the end result by changing the coordinates of the vectors making up the mesh. We can achieve the same by changing the reference frames of the blocks.
[3]:
from polymesh.space import CartesianFrame
ambient_frame = CartesianFrame(dim=3)
frame_1 = ambient_frame
frame_2 = (
ambient_frame
.rotate("Space", [0, 0, np.pi/2], "XYZ", inplace=False)
.move([0.2, 0, 0], frame=ambient_frame)
)
frame_3 = (
ambient_frame
.rotate("Space", [0, 0, np.pi], "XYZ", inplace=False)
.move([0.4, 0, 0], frame=ambient_frame)
)
frame_4 = (
ambient_frame
.rotate("Space", [0, 0, 3*np.pi/2], "XYZ", inplace=False)
.move([0.6, 0, 0], frame=ambient_frame)
)
[4]:
from polymesh import PointData
from polymesh.cells import T3 as CellData
mesh = PolyData()
bunny = download_bunny_coarse(tetra=False, read=True).centralize()
coords, topo = bunny.coords(), bunny.topology()
mesh["bunny_1"] = PolyData(
PointData(coords=coords),
CellData(topo=topo),
frame=frame_1
)
mesh["bunny_2"] = PolyData(
PointData(coords=coords),
CellData(topo=topo),
frame=frame_2
)
mesh["bunny_3"] = PolyData(
PointData(coords=coords),
CellData(topo=topo),
frame=frame_3
)
mesh["bunny_4"] = PolyData(
PointData(coords=coords),
CellData(topo=topo),
frame=frame_4
)
[5]:
mesh["bunny_1"].config["plot"] = dict(color="red")
mesh["bunny_2"].config["plot"] = dict(color="green")
mesh["bunny_3"].config["plot"] = dict(color="blue")
mesh["bunny_4"].config["plot"] = dict(color="yellow")
plotter = mesh.plot(
notebook=True,
config_key=["plot"],
return_plotter=True,
theme="document",
show_edges=True,
)
plotter.camera.tight(padding=0.1, view="xz", negative=True)
plotter.show(jupyter_backend="static")
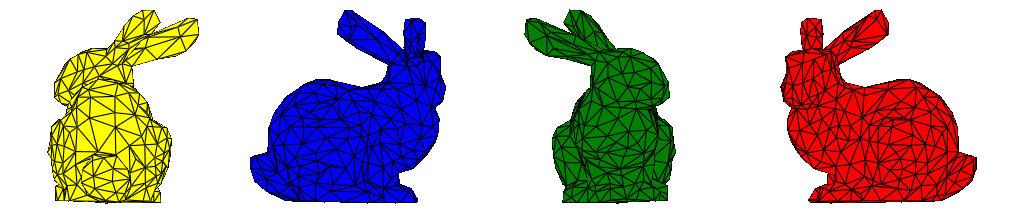
When bringing the mesh to a standard form, the oriantations of the frames are taken into account:
[6]:
mesh.to_standard_form()
[6]:
PolyData({'bunny_1': PolyData({}), 'bunny_2': PolyData({}), 'bunny_3': PolyData({}), 'bunny_4': PolyData({})})
[7]:
plotter = mesh.plot(
notebook=True,
config_key=["plot"],
return_plotter=True,
theme="document",
show_edges=True,
)
plotter.camera.tight(padding=0.1, view="xz", negative=True)
plotter.show(jupyter_backend="static")